

Το «μαρσιποφόρο» ρομπότ παρουσιάστηκε πρόσφατα στον διεθνή διαγωνισμό DARPA Subterranean (SubT) Challenge, που προσφέρει έπαθλο 3,5 αξίας εκατομμυρίων δολαρίων με χρηματοδότηση από την Υπηρεσία Έρευνας Προηγµένων Αµυντικών Προγραµµάτων του Υπουργείου Άμυνας των ΗΠΑ.
Για τον διαγωνισμό DARPA, στον οποίο συμμετείχαν 300 διαγωνιζόμενοι από 11 χώρες, κορυφαία εκπαιδευτικά ιδρύματα όπως τα MIT, CMU, CalTech και KAIST, καθώς και γνωστοί ερευνητικoί οργανισμοί όπως η NASA-JPL ή το CSIRO, οι ρομποτικές ομάδες του Πανεπιστημίου επιστημών και τεχνολογίας της Νορβηγίας (NTNU) και του Ομοσπονδιακό Ινστιτούτο Τεχνολογίας της Ζυρίχης (ETH) ανέπτυξαν ένα μαρσιποφόρο ρομποτικό σύστημα που επιτρέπει τη συνεργασία ενός επίγειου και ενός ιπτάμενου ρομπότ για περιβαλλοντική εξερεύνηση και χαρτογράφηση άγνωστων υπόγειων περιβαλλόντων, σε διάταξη μαρσιποφόρου.
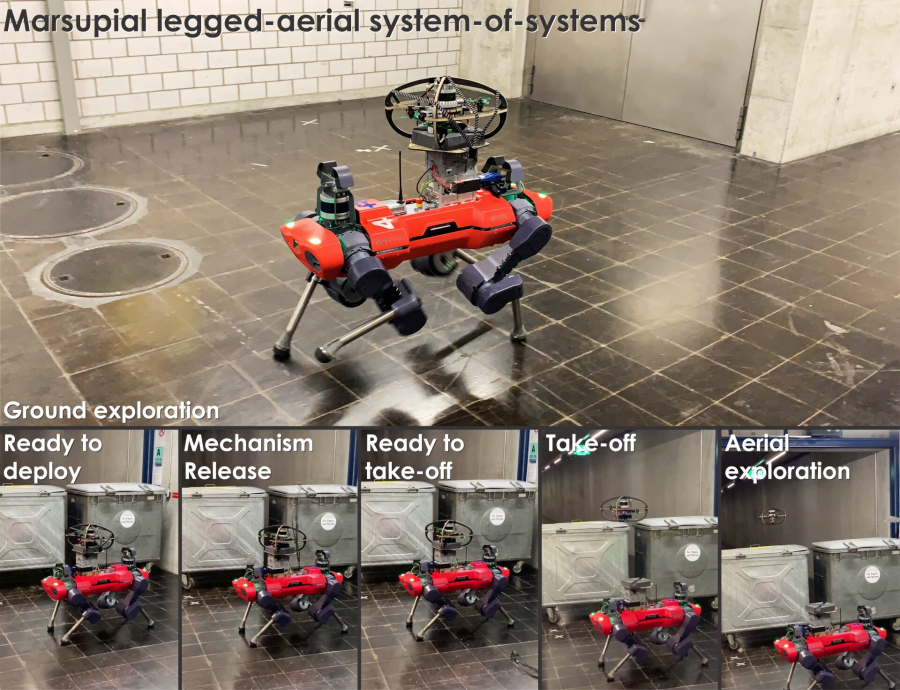
«Πιστεύουμε ότι σε άγνωστα υπόγεια και υποβαθμισμένα περιβάλλοντα, η συνεργασία μεταξύ ενός ρομπότ που περπατά όπως το ANYmal, το οποίο έχει μεγάλο χρόνο λειτουργίας, ικανότητα υψηλού ωφέλιμου φορτίου, δυνατότητα επέκτασης επίγειου σταθμού κ.λπ., αλλά περιορίζεται σε λειτουργίες εδάφους, και ενός ρομπότ που πετά όπως το RMF-Owl, καταλήγει συνολικά σε μια πολύ αποτελεσματική και λογική αποστολή εξερεύνησης» λέει ο Paolo De Petris, ένας από τους ερευνητές που πραγματοποίησαν τη μελέτη. Σε ένα τέτοιο σενάριο, το ρομπότ ANYmal θα σταλεί στο άγνωστο περιβάλλον κουβαλώντας το ιπτάμενο ρομπότ RMF-Owl στην πλάτη του. Κατά την πλοήγησή του, το ρομπότ ANYmal δημιουργεί έναν χάρτη αυτού του άγνωστου χώρου και καθώς το κάνει αυτό, εντοπίζει πιθανές περιοχές όπου μπορεί να αναπτυχθεί το ιπτάμενο ρομπότ RMF-Owl.

«Τέτοιες περιοχές θα μπορούσαν να είναι πολύ ψηλά ώστε να τις προσεγγίσει το ANYmal ή το ρομπότ να εμποδίζεται, για παράδειγμα, λόγω κατάρρευσης ενός τμήματος μιας σήραγγας και ούτω καθεξής. Όταν το ANYmal αποφασίσει ότι δεν υπάρχει άλλος χώρος που να μπορεί να πλοηγηθεί για να εξερευνήσει ή απλώς και με μια εντολή χειριστή και εάν το επιτρέπει η επικοινωνία, θα στείλει τον ενημερωμένο χάρτη στο ιπτάμενο ρομπότ RMF-Owl δίνοντάς του εντολή να εξερευνήσει μια νέα χωρική ενότητα, ενημερώνοντας και επεκτείνοντας τον κοινόχρηστο χάρτη», εξηγεί ο De Petris. Όπως η ομάδα οραματίστηκε το σύστημά της, το ιπτάμενο ρομπότ RMF-Owl θα μπορούσε να εξερευνήσει περιοχές που δεν είναι προσβάσιμες από το επίγειο ρομπότ ANYmal και μόλις τελειώσει το έργο του να επιστρέψει στο σημείο από όπου απογειώθηκε και να προσγειωθεί ξανά με ασφάλεια.
Μέχρι στιγμής, η ομάδα ανέπτυξε απλώς ένα πρωτότυπο του συστήματός της. Στο μέλλον, ωστόσο, σχεδιάζει να το αναπτύξει περαιτέρω ώστε να περιλαμβάνει περισσότερα χαρακτηριστικά. «Το RMF-Owl θα πρέπει φυσικά να προσγειωθεί στο πίσω μέρος του ANYmal, να έχει ένα σύστημα επαναφόρτισης για να γεμίζει την μπαταρία του και να είναι βελτιωμένο μηχανικά», συμπληρώνει ο De Petris.
Μέχρι στιγμής, η ομάδα αξιολόγησε το σύστημά της σε μια σειρά δοκιμών και διαπίστωσε αξιοσημείωτα αποτελέσματα. Συγκεκριμένα, οι ερευνητές παρατήρησαν μια καλή συνεργασία μεταξύ του επίγειου και του ιπτάμενου ρομπότ η οποία επέτρεψε μια ευρύτερη εξερεύνηση άγνωστων περιβαλλόντων. Στο μέλλον, το σύστημά τους θα μπορούσε να εφαρμοστεί και σε μια σειρά πραγματικών περιβαλλόντων. Για παράδειγμα, θα μπορούσε να αναπτυχθεί σε ορυχεία που έχουν καταρρεύσει, σε τοποθεσίες με στενά περάσματα, σε σπηλιές και ακόμη και σε μεγάλες βιομηχανικές εγκαταστάσεις με πολύπλοκες απαιτήσεις επιθεώρησης.
Picture credits: De Petris et.al
Πηγή:Techxplore

from Dnews: Τελευταία νέα και ειδήσεις https://ift.tt/AO7ZmkE
via IFTTT